

أصدرت Genesis AI إصدار Genesis World 1.0. تتكون المنصة من أربعة مكونات: محرك الفيزياء Genesis World، Nyx (عارض تتبع المسار في الوقت الحقيقي)، Quadrants (مترجم Python إلى GPU)، وواجهة المحاكاة. وهو مصمم لتسريع تطوير نموذج الأساس للروبوتات من خلال التقييم القائم على المحاكاة.
يواجه تطوير نموذج الروبوتات عائقين: البيانات وسرعة التكرار. وقد ركز هذا المجال بشكل كبير على البيانات. تقول Genesis AI إن عنق الزجاجة الأبطأ والأقل مناقشة هو دورة تطوير النموذج نفسها – على وجه التحديد، مدى سرعة الفرق في تقييم سياسات المرشحين ومقارنة نقاط التحقق النموذجية.
ما هي المشكلة التي يحلها هذا؟
يشمل تقييم السياسة النموذجي في Genesis مئات المهام التي تحتوي كل منها على مئات الحلقات. يتطلب تشغيل ذلك في العالم الحقيقي أكثر من 200 ساعة من التشغيل المستمر للروبوت مع مشغل واحد ومحطة روبوت واحدة – للحصول على اجتياز تقييم واحد. تتطلب المقارنات ذات المغزى إحصائيًا عبر نقاط التفتيش العديد من هذه التصاريح.
يُجري Genesis World 1.0 نفس التقييم في أقل من 0.5 ساعة، مع عدم وجود أي بشري أو أجهزة في الحلقة ونتائج متسقة تمامًا عبر عمليات التشغيل. وهذا أسرع مرتين تقريبًا من التقييم في العالم الحقيقي.
اختار فريق البحث عمدا إعطاء الأولوية للتقييم قبل استخدام المحاكاة لتوليد بيانات التدريب. منطقهم هو: إذا كان التدريب والتقييم يشتركان في نفس التوزيع المحاكى، فإن تحسين الأداء يمكن أن يعكس توافقًا أكثر صرامة مع ديناميكيات المحاكاة بدلاً من نموذج أفضل حقًا. يؤدي الحفاظ على فصل خطي الأنابيب إلى إنتاج إشارة أنظف.
يصف فريق البحث نهج التقييم هذا بأنه صفر طلقة حقيقية لسيم: يتم تدريب السياسات التي يتم تقييمها في المحاكاة حصريًا على بيانات العالم الحقيقي. لا توجد بيانات محاكاة تدخل في التدريب المسبق.
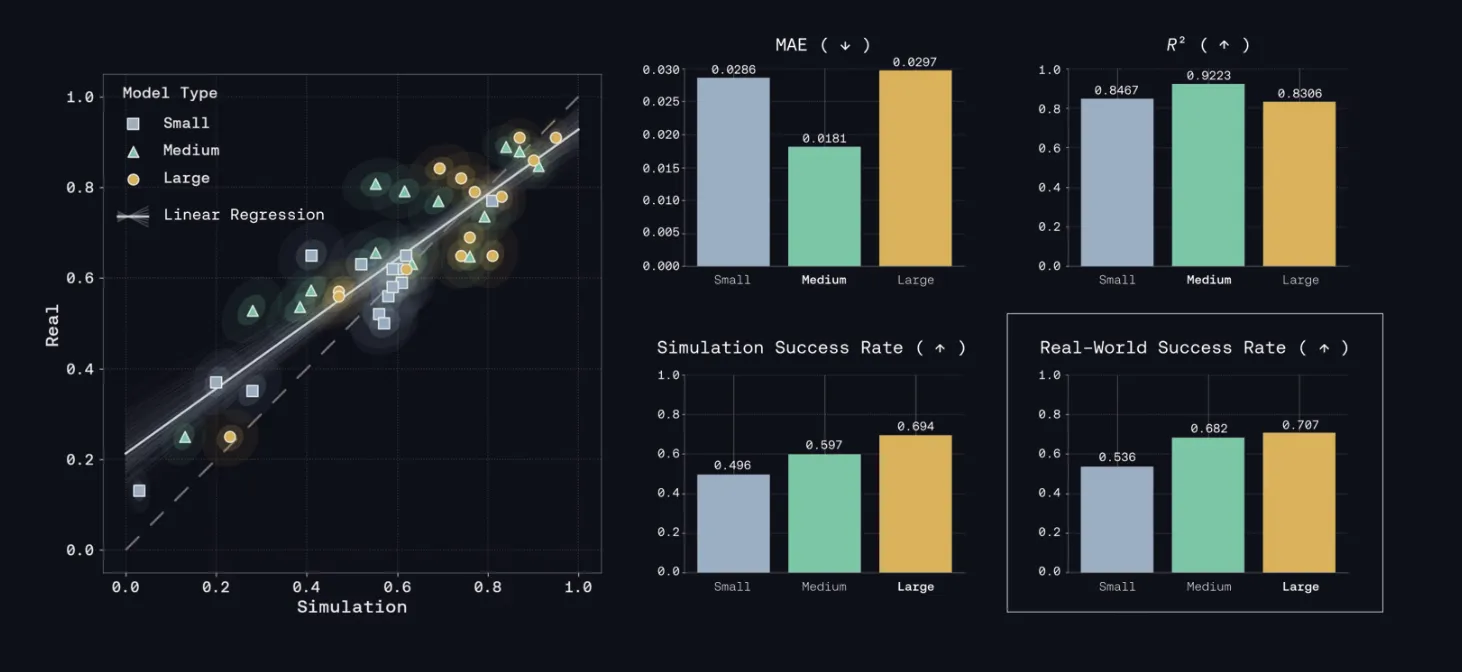
نتائج الارتباط Sim-to-Real
أبلغ فريق بحث سفر التكوين عن ارتباط بيرسون بـ 0.8996 (95% فترة ثقة: [0.7439, 0.9314]) بين المحاكاة والطرح على الأجهزة. غطى التقييم ثلاثة نماذج مختلفة (صغير، متوسط، كبير) عبر 14 مهمة مع 200 حلقة لكل مهمة. أجرى فريق البحث 1,000,000 تكرار لتقدير فترات الثقة.
متوسط الحد الأقصى لانتهاك الرتبة (MMRV) — وهو مقياس مقترح في SimplerEnv — كان 0.0166 (95% فترة ثقة: [0.0102, 0.0474]). يعني انخفاض MMRV أن المحاكي يحافظ على تصنيف الأداء النسبي للنماذج المختلفة.
لتشخيص مصدر الاختلاف بين المحاكاة والواقع، قام فريق Genesis ببناء منصة جنبًا إلى جنب في الوقت الفعلي. يقوم بتشغيل جهاز المحاكاة والروبوت المادي بالتوازي من نفس التهيئة. يمكن أن تأتي الملاحظات – إطارات الكاميرا واستقبال الحس العميق – من جهاز المحاكاة، أو الروبوت، أو مزيج من الاثنين معًا. يؤدي تبديل مصدر واحد في كل مرة إلى عزل ما إذا كان الاختلاف ينشأ من الفيزياء أو العرض أو الاتصال أو التحكم.
بعد هذا العمل، أصبحت فجوة الواقع الخاصة بهم أصغر بنسبة 45%، والتي تم قياسها من خلال درجة FID في مجموعة البيانات الخاصة بهم، من ثاني أفضل جهاز محاكاة بديل.
المكونات الأربعة لسفر التكوين العالم 1.0
Nyx – عرض تتبع المسار في الوقت الفعلي
Nyx عبارة عن أداة تتبع مسار متسارعة بواسطة GPU ويتم توصيلها بـ Genesis World كمستشعر للكاميرا. وهي متاحة كما gs-nyx-plugin حزمة بايثون. تتوفر العجلات المعدة مسبقًا لنظام التشغيل x86-64 Linux (manylinux 2.34+) ونظام التشغيل Windows 10/11، وتتطلب وحدة معالجة الرسومات NVIDIA مع CUDA.
يستهدف Nyx إطارات 1080 بكسل خالية من الضوضاء 4 مللي ثانية أو أقل على وحدة معالجة الرسومات الاستهلاكية المتطورة، بدون أي خبز أو ظلال. للوصول إلى هذا الهدف، فإنه يستخدم مخزنًا مؤقتًا للرؤية، وبنية غير مرتبطة تعتمد على وحدة معالجة الرسومات، وMSAA، وتتبع أشعة الأجهزة، ونوى مصفوفة الأجهزة، وضغط الفيديو.
تتبع المسار هو خط الأساس: الإضاءة متعددة الارتداد، والظلال الناعمة، والإضاءة غير المباشرة صحيحة من خلال البناء. يوجد نموذج كاميرا مؤرض فعليًا في الأعلى. يضيء خط أنابيب HDRI المشاهد بإشعاع مُقاس. تأتي الأصول من المسح الداخلي والمسح التصويري. تعمل البقع الغوسية ثلاثية الأبعاد على توسيع التغطية حيث تكون إعادة بناء الشبكة غير كافية.
يتم تشغيل Nyx بواسطة الفيزياء المجمعة بدلاً من التنفيذ مشهدًا تلو الآخر. يتيح ذلك لآلاف عمليات النشر المتوازية – لكل منها سيناريو وإضاءة ومسار الكاميرا الخاص بها – بالمرور عبر مسار عرض موحد واحد.
سفر التكوين للفيزياء العالمية – محرك موحد متعدد الفيزياء
منصة الفيزياء Genesis World مفتوحة المصدر (Apache 2.0) وتدير فيزياء متعددة في خط أنابيب واحد: الأجسام الصلبة المفصلية (MJCF/URDF/USD)، وFEM للمواد القابلة للتشوه والقماش، وMPM للمواد البلاستيكية الحبيبية والمرنة، وSPH للسوائل، وPBD للقماش السريع والسوائل القائمة على الموضع.
تتوفر ثلاث قارنات توصيل قابلة للتبديل خلف واجهة برمجة التطبيقات (API) للمشهد نفسه: قارنة توصيل سريعة للأغراض العامة؛ قارنة التوصيل البدائية شبه التحليلية على طراز دريك مع اتصال مائي مرن؛ ومقرنة اتصال محتملة تزايدية (IPC) للاتصال الخالي من التقاطع في المشاهد القابلة للتشوه. يتطلب التبديل بين أدوات التوصيل تغييرًا في الكود من سطر واحد، دون إجراء أي تغييرات على الأصول أو أجهزة الاستشعار أو واجهة السياسة.
قدم Genesis World 1.0 حلين جديدين. ال قيود المفصلة الخارجية (المبني على أعلى libuipc) يدمج ديناميكيات الفضاء المشترك مباشرة في تحسين IPC، بحيث تحل قوى الفضاء المشتركة وقوى الاتصال في وقت واحد بدلاً من التدرج عبر حلول منفصلة. والثاني هو ديناميكا مرنة خالية من العوائق، والذي يستبدل الحاجز اللوغاريتمي الخاص بـ IPC بـ Lagrangian المعزز المخصص. حاجز IPC القياسي يجعل منطقة Hessian سيئة التكييف مع تشديد الاتصالات. تتجنب تركيبة لاغرانج المعززة ذلك، مما يسمح لكل زوج اتصال يتم إرجاعه عن طريق الكشف المستمر عن الاصطدام بالدخول إلى المجموعة النشطة على الفور. تقرير فريق البحث يصل إلى 103× أسرع أداء أفضل من تقنية IPC التقليدية في مشاهد الاتصال الكثيف، مع الحفاظ على ضمانات خالية من التقاطع.
تحسينات إضافية: أجهزة استشعار جديدة (نقطة سحابة اللمس، وشبكة درجة الحرارة، والقرب)، وFEM الضمني مع حل Newton + CG، ودعم الأصول الموسع (URDF xacro، والمحركات العامة MuJoCo، والمفاصل المركبة/التقليدية، وقيود المساواة/اللحام).
الأرباع – مترجم Python إلى GPU
Quadrants هو مترجم متعدد المنصات لمحاكاة الفيزياء المتسارعة بواسطة وحدة معالجة الرسومات، تم تطويره بواسطة Genesis AI وتم إصداره ضمن Apache 2.0. تتم كتابة النواة بلغة Python العادية وتم تجميعها بواسطة JIT إلى وحدات المعالجة المركزية NVIDIA CUDA وAMD ROCm وApple Metal وVulkan وx86/ARM64 عبر LLVM. تم تشعبها من Taichi في يونيو 2025. يشير الاسم إلى القول الفلسفي الصيني بأن Taichi يؤدي إلى الأشكال الأربعة (الأرباع).
تحسينات الأداء الرئيسية على Taichi المنبع: ما يصل إلى 4.6× وقت تشغيل أسرع في معالجة Genesis ومعايير الحركة. وقت بدء تشغيل ذاكرة التخزين المؤقت الدافئة لـ single_franka_envs.py انخفض من 7.2 ثانية إلى 0.3 ثانية – أكثر من 10× تسريع. أصبح الوضع التلقائي العكسي الآن مواطنًا من الدرجة الأولى في جميع الواجهات الخلفية، مما يجعل المحاكاة القابلة للتمييز محمولة.
يتم تسجيل الخطوات الفيزيائية كرسومات بيانية مفردة للنواة، مما يؤدي إلى إزالة زمن الوصول لكل خطوة. تعمل النوى المستقلة بالتوازي عبر التدفقات. يتم تجميع الجبر الخطي الكثيف (تحليل تشولسكي، الحلول الثلاثية) إلى مسارات تعليمات برمجية محظورة بحجم 16 × 16. تعمل طبقة إرسال الأداء على قياس متغيرات kernel عند الاتصال الأول وتخزين أسرع خيار لكل توقيع. تشارك Tensors ذاكرة الجهاز مع PyTorch عبر DLPack مع إمكانية التشغيل بدون نسخة.
تثبيت:
واجهة المحاكاة
المكون الرابع هو واجهة المحاكاة: الأدوات التي تربط المحرك الفيزيائي، والعارض، والمترجم في نظام قابل للاستخدام لتطبيقات الروبوتات النهائية. يتضمن ذلك مسارًا للمسح التصويري لإنشاء توائم رقمية، وخطًا آليًا لإنشاء بيئة برمجية (تخطيط المشهد، واختيار الأصول، ومواصفات المهمة، ومقاييس النجاح)، وبيئات التجسيد المتقاطع التي تغطي تكوينات روبوت متعددة.
إطار التقييم
يقوم Genesis ببناء التقييم كتصنيف لمحاور الاضطراب المتعامدة عبر حوالي 10 أبعاد، باتباع الإطار الوارد في “تصنيف لتقييم سياسات التلاعب بالروبوتات العامة”:
- مرئي: ظروف الإضاءة، اضطراب الكاميرا، اختلاف الخلفية
- السلوكية: مجموعات الكائنات غير المرئية، والاختلافات في المواضع، وتكوين الروبوت
- الدلالي: إعادة صياغة اللغة، ترتيب المهام الفرعية، وجهة نظر الكاميرا
بالنسبة لكل محور، تتغير معلمة واحدة بينما تظل جميع المعلمات الأخرى عند القيم الاسمية. يعرّف فريق البحث المتانة على محور معين بأنها الأداء النسبي الذي يتم الاحتفاظ به في ظل الاضطراب مقارنةً بالإعداد الاسمي غير المضطرب. تتطلب عمليات الاضطراب عبر نقاط التفتيش التدريبية بمقاييس نموذجية متعددة آلاف حلقات التقييم لكل نقطة بيانات. هذا المقياس ممكن فقط لأن تقييم المحاكاة يتم بدون أجهزة.
الوجبات السريعة الرئيسية
- يحتوي Genesis World 1.0 على أربعة مكونات: Nyx (العارض)، وGenesis World (الفيزياء)، وQuadrants (المترجم)، وواجهة المحاكاة.
- يحقق تقييم المحاكاة ارتباط بيرسون بقيمة 0.8996 مع عمليات النشر على الأجهزة عبر 14 مهمة و200 حلقة لكل منها.
- يتم تدريب السياسات على بيانات العالم الحقيقي فقط؛ لا توجد بيانات محاكاة تدخل في التدريب المسبق (صفر طلقة حقيقية لمحاكاة).
- تحقق الديناميكيات المرنة الخالية من العوائق سرعة تصل إلى 103× مقارنة بتقنية IPC التقليدية في مشاهد الاتصال الثقيلة.
- تحقق Quadrants وقت تشغيل أسرع بما يصل إلى 4.6× مقارنة بـ Taichi، مع انخفاض بدء تشغيل ذاكرة التخزين المؤقت الدافئة من 7.2 ثانية إلى 0.3 ثانية.
مستودعات جيثب:
أيضا، لا تتردد في متابعتنا على تغريد ولا تنسى الانضمام إلينا 150 ألف+ مل من SubReddit والاشتراك في النشرة الإخبارية لدينا. انتظر! هل أنت على برقية؟ الآن يمكنك الانضمام إلينا على التليجرام أيضًا.
هل تحتاج إلى الشراكة معنا للترويج لصفحة GitHub Repo أو صفحة الوجه المعانقة أو إصدار المنتج أو الندوة عبر الويب وما إلى ذلك؟ تواصل معنا

ميشال سوتر متخصص في علوم البيانات وحاصل على درجة الماجستير في علوم البيانات من جامعة بادوفا. بفضل أساس متين في التحليل الإحصائي والتعلم الآلي وهندسة البيانات، تتفوق ميشال في تحويل مجموعات البيانات المعقدة إلى رؤى قابلة للتنفيذ.